LABORATOR MBR 2 - SISTEME INTELIGENTE. ACHIZITII DATE ȘI ROBOTICĂ
DOMENIUL DE ACTIVITATE
Echipa de cercetare se concentrează pe cercetarea, proiectarea și dezvoltarea de:
- sisteme inteligente și dispozitive pentru achiziție de date
- sisteme robotice cu aplicații non-industriale: roboți de inspecție, roboți de intervenție, sisteme de poziționare robotice cu cinematică serială/ paralelă/ hibridă, roboți mobili autonomi.
FACILITĂȚI
Laboratorul MBR2 prezintă următoarele dotări:
- Stație grafică și calculatoare performante echipate cu programe destinate asistării proceselor de proiectare grafică, mecanică, electronică – SolidWorks CAD, MatLab, FluidSim, LabView;
- Platforme Raspberry destinate procesării inteligente a imaginilor.
- Atelier complet utilat ce servește două scopuri:
- Facilitarea asamblării/testării prototipurilor proiectate;
- Facilitarea proceselor de brainstorming.
PROIECTE PRINCIPALE
I. Sistem robotic hexapodal cu mobilitate extinsă pentru acționare inteligentă în spații limitate sau medii ostile – HEXAGENT
Obiectiv: Proiectul HEXAGENT își propune să demonstreze funcționalitatea unui sistem robotic compact cu structură cinematică hibridă, alcătuit din doi hexapozi conectați în serie și comandați astfel încât să aibă configurații identice în orice moment - în termeni de robustețe, acuratețe și manevrabilitate în spații limitate.
Proiectare model: Optimizarea soluției HEXAGENT a fost posibilă prin utilizarea a trei instrumente, arătate în figura de mai jos.

imaginile următoare sunt prezentate diferite etape de proiectare 3D.

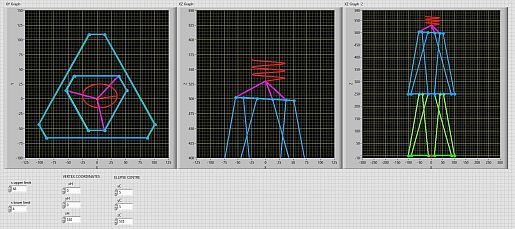
Programare model
- Software de comandă "point to point" (PTP) - reprezintă modalitatea principală de comandă a sistemului robotic dublu hexapod, fiind realizat în mediul de dezvoltare LabVIEW.

- Software de comandă în modul programabil. Sistemul HEXAGENT poate fi programat să execute deplasări după o traiectorie prestabilită, utilizând ecuațiile parametrice ale curbei respective, cu condiția să nu se iasă din spațiul de operare. Un exemplu îl reprezintă programul de generare a unei spirale eliptice:
Produs demonstrativ și utilizări
Dintre posibilele utilizări, menționăm:
- Manevrarea cu precizie a obiectelor și realizare de mișcări complexe în spații înguste
- Chirurgie robotizată de tip master-slave
- Sisteme de iluminare inteligente, acționarea unor elemente dinamice utilizate în arhitectura modernă.
- Realizarea de mișcări tehnologice complexe/ tridimensionale.
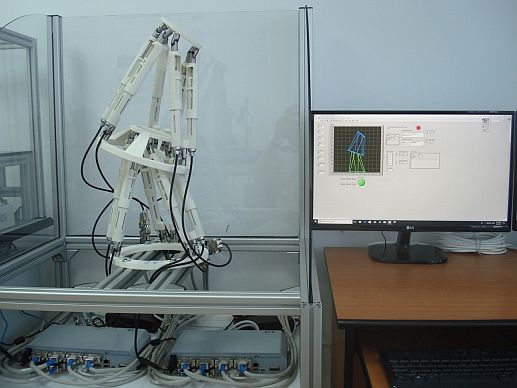
Produs demonstrativ HEXAGENT
II. Sisteme robotice autonome pentru managementul deşeurilor în contextul oraşului inteligent - SIRAMAND
Consorțiu

Obiectiv general
Proiectul complex SIRAMAND este compus din trei proiecte componente care își propun să rezolve probleme diferite din domeniul deșeurilor menajere solide.
Scopul Proiectului component 1 (INCDMTM ) este de a realiza un robot mobil autonom de colectare deșeuri (RCD) care are rolul de a suplini munca anostă a îngrijitorilor stradali și de spații verzi.
Realizare model demonstrativ RCD
Proiectul se află în stadiul de sistem integrat ce urmează a fi testat în cursul anului 2021, în etapa de “Validare sistem”. În figurile de mai jos sunt redate diverse subansambluri ale robotului:
 Cadru
Cadru

Roată motoare

Modul apucare deșeuri
Sistem RCD integrat

Detectare deșeu prin programul CheckOpti

Comanda sistemului de poziționare XYZ
După detectare, deșeul este apucat prin sistemul cu vacuum sau sistemul prehensor și depozitat în containerul pentru deșeuri. Algoritmul este realizat în programul CODESYS.
III. Sistem colaborativ eterogen de inspecție și intervenție în zone afectate de dezastre – SICOLET
Obiectiv general
Obiectivul general al proiectului este de a dezvolta un model demonstrativ pentru un sistem colaborativ eterogen format dintr-un centru de comandă CCO și un anumit număr de agenți de inspecție/ intervenție.
Funcționarea semiautonomă este determinată de algoritmi de decizie și comandă inteligenți, fiind destinat inspecției și intervenției cu rapiditate și eficiență în zone afectate de diverse dezastre naturale sau provocate de om.
Componență sistem colaborativ
Sistemul colaborativ eterogen SICOLET este un sistem multi-agent/ multi-agent system (MAS) format din trei vehicule diferite (VAD, EKP și VTR, opțional fiind și RTS), Prin diferitele lor caracteristici, cei trei agenți se pot completa reciproc, extinzând semnificativ capacitățile sistemului. Sistemul multi-agent SICOLET este compus dintr-un centru de control și următorii agenți:

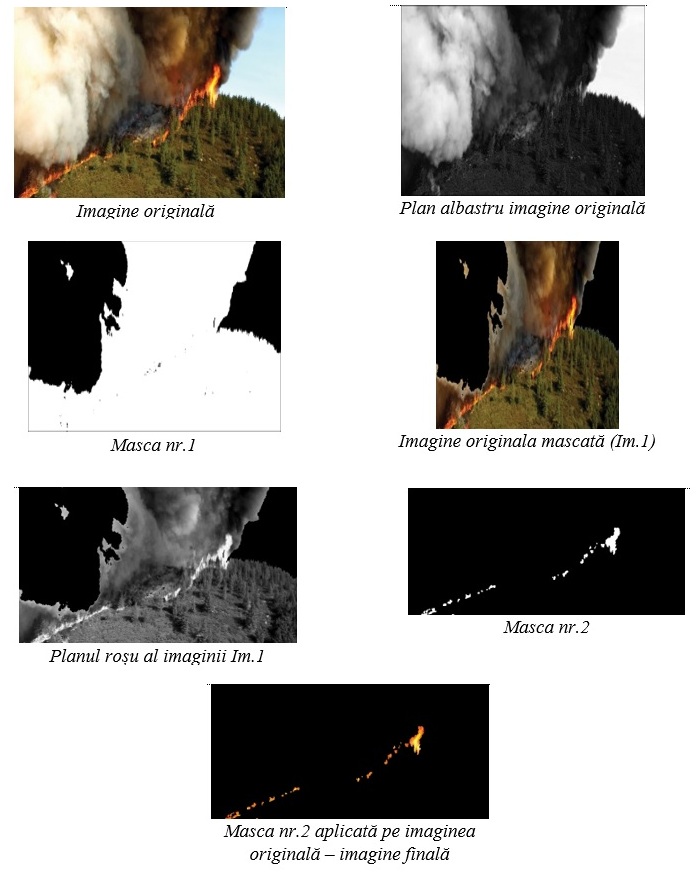
Rezultate experimentale algoritm RGB de detectare a incendiilor
Imaginea utilizată ca date de intrare pentru primul algoritm conține o zonă mare de fum (sus-stânga) și o zonă de cer (dreapta sus). Aceste zone pot fi detectate ca zone de foc fals pozitive. Acestea sunt eliminate folosind o imagine de mască binară obținută prin aplicarea unui prag pe planul albastru al imaginii.
Rezultate experimentale algoritm HSV / HSL. Datele de intrare pentru al doilea algoritm sunt o imagine dintr-o acțiune de incendiu a orașului. Valorile prag pentru cele două măsti sunt detectate automat.

IV. A novel Wireless, wearable Shoe-based system for real time monitoring of Energy Expenditure and Gait parameters for Sport and Medical Applications/Un nou sistem wireless incorporat în încălțăminte pentru monitorizarea în timp real a consumului energetic și a parametrilor mersului pentru aplicații sportive și medicale – WiShoe ( 2014-2015)
Consorțiu

Obiectiv principal
Obiectivul principal al proiectului WiShoe a fost dezvoltarea unui sistem complet non-intruziv, la purtător, integrat în încălțăminte, pentru măsurarea parametrilor cinematici ai mersului și a consumului energetic în timpul a diverse activități. Sistemul WiShoe integrează senzori miniaturali și soluții IT în talpa ghetei proiectată în mod special pentru acest scop și permite monitorizarea subiectului fără intervenția unui expert.
Parametri specifici măsurați
- Forța de reacție verticală față de sol;
- Ciclul de mers;
- Cadența;
- Viteza de mers;
- Lungimea pasului;
- Deplasarea verticală a centrului de masă;
- Rapoartele de simetrie;
- Echilibrul în staționare;
- Consumul energetic.
Rezultatele proiectului
- Două versiuni ale prototipului WiShoe: cea profesională și versiunea “Light”, ușor mai puțin precisă.
- Fiecare gheată integrează 16 senzori de forță, un accelerometru pe 3 axe, un giroscop pe 3 axe și electronică de achiziție date și comunicație (Bluetooth).
- O aplicație de telefon mobil aflat la câțiva metri distanță pentru avertizări în timp real și feedback pentru parametrii selectați.
- O aplicație profesională tip “cloud” pentru o analiză detaliată a datelor
- Biblioteci software pentru algoritmii dezvoltați
- Dispozitiv de calibrare al sistemului, incluzând software-ul aferent.

Contribuții INCDMTM
- Specificații tehnice;
- Algoritmi matematici care stau la baza software-ului specific al produsului;
- Activități diseminare.
Publicații principale MBR2
- Dumitriu, T.V. Nguyen, I. Stroe, M. Mărgăritescu, C. Lala - Mechanical work reduction during manipulation tasks of a planar 3-DOF manipulator - The Romanian Journal of Technical Sciences, Romanian Academy, Publishing House of the Romanian Academy, ISSN2601-5811
- Mărgăritescu, D. Dumitriu, C. Brișan, A. M. E. Rolea, A. Constantin, “Complex and Robust Motion Performed in Extended Workspace with a Double Hexapod Robotic System”, Mechanika” 2020 26(6);
- 2. D. O. Melinte, A. Travediu, D. Dumitriu - Deep Convolutional Neural Networks object detector for real-time waste identification - Applied Sciences, ISSN 2076-3417, vol. 10(20), 2020, special issue “Bio-inspired Computation and Applications”, ID articol 7301, https://doi.org/10.3390/app10207301, open access: https://www.mdpi.com/2076-3417/10/20/7301, IF 2.474 (2019).
- Dumitriu, T.V. Nguyen, I. Stroe, M. Mărgăritescu, C. Lala - Mechanical work reduction during manipulation tasks of a planar 3-DOF manipulator - The Romanian Journal of Technical Sciences, Romanian Academy, Publishing House of the Romanian Academy, ISSN2601-5811
- V. Canale, A. Stan, V. M. Zafiu, A. C. Dinu - "Automatic solar tracking system„ - International Journal of Mechatronics and Applied Mechanics (IJOMAM), 2019, Issue 6
- N. Ancuța, M. Mărgăritescu, V. M. Zafiu, A. Stan, A. C. Dinu, E. V. Canale - “Fire detection algorithms used by a heterogeneous multi-agent system” - International Journal of Mechatronics and Applied Mechanics (IJOMAM), 2020, Issue 8
- Stan, N. L. Milodin - “Robotic arm structural frame enhancement by gyroid lattice cube integration” - International Journal of Mechatronics and Applied Mechanics, 2020, Issue 8
Brevete și cereri de brevet MBR2
- Brevet nr. 125589/2016: „Sistem de poziţionare robotic multi hexapod” - Mărgăritescu Mihai, Brișan Cornel, Panaitopol Horia
Premii:
- Medalie de aur la Salonul internaţional de inventică Geneva – 2012
- Medalie de aur cu mențiune specială - Salonul Internațional de Inventică PRO INVENT, ediția a XIV-a, 2016, Cluj-Napoca, România
- Brevet nr. 128113 / 2013 - "Sistem de mǎsurare cu ultrasunete a depunerilor de sedimente în lacurile de acumulare" - Mihai Mărgăritescu, Alexandru Moldovanu, Vlad Văduva, Cristian Drăghescu, Florin Liviu Isvoranu
Premii:
- Medalie de aur la Salonul de Inventică și Inovații INVENTIKA, București – 15 - 18 oct. 2014 / Ministerul Educației Naționale
- Diploma de excelență și medalie de aur la Salonul Internațional de Inventică PRO INVENT, Ediția a XIII-a, 2015, Cluj-Napoca, România / Universitatea Tehnică din Cluj-Napoca, sub egida Ministerului Educației și Cercetării Științifice și Academiei de Științe Tehnice din România, filiala Cluj
- Premiul special la Salonul Național al Cercetării, Inovării și Inventicii PRO INVENT - 2015/ oferit de Oficiul de Stat pentru Invenții și Mărci (OSIM)
- Medalie de aur la The XIX-th International Exhibiton of Research, Innovation and Technological transfer INVENTICA 2015, Iași
- Brevet nr. 130278/2015: „Modul receptor ultrasonic subacvatic” - Vlad Văduva, Alexandru Moldovanu, Ioan Lung, Mihai Mărgăritescu
Premii:
- Medalie de aur cu mențiune specială - Salonul Internațional de Inventică PRO INVENT, ediția a XIV-a, 2016, Cluj-Napoca, România
- Medalie de aur la Salonul internaţional de inventică Geneva – 2016
- Medalie de aur la Târgul internaţional al inovării Bruxelles – 2016
- Brevet nr A/00760/2019 : “ Roată omnidirecțională cu elemente segmentate extensibile” – Zafiu Victor-Marin.
- Cerere Brevet nr. A00112/2018: „Sistem robotic dublu hexapod cu spațiu de operare extins” - Mărgăritescu Mihai
Premii:
- Diplomă de excelență și Medalie de aur - Salonul Internațional al Cercetării Științifice, Inovării și Inventicii PRO INVENT, ediția a XVI-a, 21-23 Martie 2018, Cluj-Napoca, România
- Medalie de argint la European Exhibition of creativity and innovation EURO I- Medalie de aur la Salonul Internațional de Invenții și Inovații Traian Vuia, 15 Iunie 2018, Timișoara.
- Medalie de aur la al XXII-lea Salon Internațional al Cercetării, Inovării și Transferului Tehnologic INVENTICA 2018, 27-29 Iunie. Iași. Au mai fost acordate: Diplomă de excelență din partea Universității Tehnice a Moldovei și Diplomă de excelență din partea INMA București.
- Cerere Brevet nr. A/00969/2018: „Elemente asamblabile pentru carcase sau containere” - Mărgăritescu Mihai, Brișan Cornel Mircea, Dumitriu Dan






